
【电子书】2024 年北部湾大学机械设计基础(加试)考研复试精品资料
说明:本套考研复试资料由本机构多位高分研究生潜心整理编写,2024 年考研复试重要资料。一、2024 年北部湾大学机械设计基础(加试)考研复试资料
《机械设计基础》考研复试相关资料
《机械设计基础》[笔记+课件+提纲]
①《机械设计基础》考研复试笔记。
说明:本书重点复习笔记,条理清晰,重难点突出,提高复试复习效率,考研复试重要资料。
②《机械设计基础》本科生课件。
说明:参考书配套授课 PPT 课件,条理清晰,内容详尽,版权归属制作教师,本项免费赠送。
③《机械设计基础》复试复习提纲。
说明:该科目复习重难点提纲,提炼出重难点,有的放矢,提高复习针对性。
《机械设计基础》考研复试核心题库(含答案
)
①北部湾大学机械设计基础(加试)考研复试核心题库之简答题精编。
②北部湾大学机械设计基础(加试)考研复试核心题库之计算题题精编。
说明:本题库涵盖了该复试科目常考题型及重点题型,根据复试考试要求进行了分类整理汇编并给出了详细答案解析,针对性强,是考研复试重要资料。
《机械设计基础》考研复试题库[仿真+预测+冲刺]
①2024 年北部湾大学机械设计基础(加试)考研专业课复试五套仿真模拟题。
说明:严格按照本科目最新复试题型和难度出题,共五套全仿真模拟试题含答案解析,复试重要资料。
②2024 年北部湾大学机械设计基础(加试)考研复试终极预测五套题及详细答案解析。
说明:复试复习效果检测使用。共五套核心题库,均含有详细答案解析,考研复试复习重要资料。
③2024 年北部湾大学机械设计基础(加试)考研复试冲刺五套模拟题及详细答案解析。
说明:考研复试冲刺预测。共五套冲刺预测试题,均有详细答案解析,最后冲刺重要资料。
二、复试资料全国统一零售价
本套考研复试资料包含以上一、二部分
(
不含教材
),
全国统一零售价:
[
¥
]
特别说明:
①本套复试资料由本机构编写组按照考研复试大纲、复试真题(回忆)、指定参考书等公开信息整理收集编写,仅供考研复试复习参考,与目标学校及研究生院官方无关,如有侵权、请联系我们将立即处理。
②复试资料中若含有真题及课件为免费赠送,仅供参考,版权归属学校及制作老师,在此对版权所有者表示感谢,如有异议及不妥,请联系我们,我们将无条件立即处理!资料若有更新,免费赠送电子版。
三、2024 年年研究生入学考试复试指定/推荐参考书目(资料不包括教材) 3.北部湾大学机械设计基础(加试)考研复试参考书
杨可桢《机械设计基础》
四、本套考研资料适用院系机械与船舶海洋工程学院
版权声明
编写组依法对本书享有专有著作权,同时我们尊重知识产权,对本电子书部分内容参考和引用的市面上已出版或发行图书及来自互联网等资料的文字、图片、表格数据等资料,均要求注明作者和来源。但由于各种原因,如资料引用时未能联系上作者或者无法确认内容来源等,因而有部分未注明作者或来源,在此对原作者或权利人表示感谢。若使用过程中对本书有任何异议请直接联系我们,我们会在第一时间与您沟通处理。
因编撰此电子书属于首次,加之作者水平和时间所限,书中错漏之处在所难免,恳切希望广大考生读者批评指正。
目录
2024 年北部湾大学机械设计基础(加试)复试备考信息北部湾大学机械设计基础(加试)考研复试参考书目
杨可桢《机械设计基础》
北部湾大学机械设计基础(加试)考研复试招生适用院系机械与船舶海洋工程学院
2024 年北部湾大学机械设计基础(加试)考研复试核心笔记
《机械设计基础》考研复试核心笔记
第 1 章 平面机构的自由度和速度分析考研提纲及考试要求
考点:运动副的种类及表示方法考点:件的表示方法
考点:平面机构运动简图的概念
考点:构件的分类及带有运动副元素的构件的图示考点:自由度的引入
考点:自由度公式的推导考点:自由度的计算
考研核心笔记
【核心笔记】运动副及其分类
机构是由两个以上有确定相对运动的构件组成的。而机构的最主要特征是构件之间具有确定的相对运动。
运动副:两个构件直接接触而形成的可动连接。
运动副的种类及表示方法
低副两构件构成面接触的运动副。分为转动副和移动副。
①转动副两构件间只能产生相对转动的运动副。
②移动副两构件间只能产生相对移动的运动副。
高副两构件构成点、线接触的运动副。表示方法:绘出起接触处的实际轮廓形状。
构件的表示方法
参与形成两个运动副的构件
参与形成三个转动副的构件

【核心笔记】平面机构运动简图
平面机构运动简图的概念
机构运动简图——根据机构的运动尺寸(确定各运动副相对位置的尺寸),按一定的比例尺定出运动
副的相对位置,并用简单的线条和规定的符号代表构件和运动副,绘制出能够表达机构运动特征的简单图形。
构件的分类及带有运动副元素的构件的图示
构件的分类
机构中的构件按其运动性质可分为三类:
①机架机架是机构中视作固定不动的构件,它用来支承其它可动构件。例如各种机床的床身是机架,它支承着轴、齿轮等活动构件。在机构简图中,将机架打上斜线表示。
②原动件已给定运动规律的活动构件,即直接接受能源或最先接受能源作用有驱动力或力矩的构件。例如柴油机中的活塞。它的运动是外界输入的,因此又称为输入构件。在机构简图中,将原动件标上箭头表示。
③从动件机构中随着原动件的运动而运动的其他活动构件。如柴油机中的连杆、曲轴、齿轮等都是从动件。当从动件输出运动或实现机构的功能时,便称其为执行件。
机构运动简图的绘制方法和步骤:
①明确机构的组成、研究分析机构的运动情况、认明机架、原动件及构件间的运动副,构件用数字编号,运动副用字母代表。
②选择视图平面一般选择与各构件运动平面相互平行的平面作为视图平面。
③绘制机构运动简图选择适当的比例,从主动件开始依次绘图,就可以得到机构运动简图。
【核心笔记】平面机构的自由度
概念
平面机构的自由度——机构具有确定运动的独立运动参数称为机构的自由度。
自由度的引入
构件的独立运动称为自由度。一个作平面运动的自由构件具有 3 个独立的运动,见下图。

平面自由度
即沿 x 轴、y 轴移动及绕垂直于 xoy 面的轴线的转动。
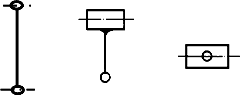
构件组成运动副后,其运动就受到了约束,其自由度数随之减少,不同类型的运动副带来的约束不同。如图 2 移动副中,限制了 2 相对 1 沿垂直于导路的移动及相对限制转动,引入两个约束。

如图 3 中转动副限制了 2 相限制 1 沿 x 轴 y 轴移动,引入两个约束。

如图 4 高副中,限制了 2 相对 1 沿法线轴的移动,引入一个约束。

图 4 高副及表示符号
自由度公式的推导
如设平面机构共有n 个活动构件(不包括机架),当此机构的各构件尚未通过运动副联接时,显然它们共有 3n 个自由度。
当两构件构成运动副之后,它们的运动就将受到约束,其自由度将减少,假设各构件间共构成了 pL 个
低副和 pH 个高副,自由度减少的数目等于运动副引入的约束( 2 pL pH )。于是,该机构的自由度应为
F 3n 2 pL pH 3n 2 pL pH (1)
自由度的计算


图 5 平面四连杆机构图 6 平面五连杆机构
三个活动构件,四个低副,零个高副。
F 3 3 2 4 0 1
四个活动构件,五个低副,零个高副
F 3 4 25 0 2
【核心笔记】速度瞬心及其在机构速度分析上的应用
定义
所谓速度瞬心是指两个相对运动的构件上瞬时相对速度为零的重合点,简称瞬心。若该重合点的绝对速度为零则称为绝对速度瞬心,若重合点绝对速度不为零则称为相对速度瞬心。
瞬心的确定方法
直接以运动副相连的两构件速度瞬心确定方法:若为转动副连接,铰链中心即为速度瞬心;若以移动副相连,速度瞬心在垂直于导路方向的无穷远处;若构成平面高副,速度瞬心必位于接触点的公法线。此外,做平面运动的三个构件之间的三个速度瞬心必定在同一条直线上。
速度瞬心在机构中的应用
求线速度
在如下图所示凸轮机构中,已知该机构尺寸和凸轮 2 的角速度ω,求从动件 3 在图示位置的线速度。
解:机架 1 与构件 2 以转动副连接,速度瞬心 P12 为铰链中心;构件 3 与机架 1 为移动副,速度瞬心
P13 在垂直于移动副方向的无穷远处;构件 2 和构件 3 形成高副,速度瞬心在接触点的法线方向。根据三心定理,三个速度瞬心应该位于一直线上,据此求出P23 的确切位置。再根据速度瞬心的概念可得:
ω·P12P23=Vp23=V3

求角速度
在如下图所示铰链四杆机构中,已知各杆长度和杆 2 角速度ω2,求杆 4 角速度ω4。

解:该四杆机构理论上有 6 个速度瞬心,有题意可知,其中构件 1 和 3 的速度瞬心 P13 对本题求解没
有作用,除此之外速度瞬心有 5 个,4 个铰链点分别是 4 个速度瞬心,而杆 2 和杆 4 的速度瞬心由三心定理可知在如图P24 所示位置。由此可得:
Vp24=(P12P24)·ω2, Vp24=(P24P14)·ω4, ω4=ω2·(P24P14)/(P12P24)
求高副机构的传动比。
已知高副机构如下图所示,求该机构传动比。

解:根据速度瞬心的确定方法可知该机构速度瞬心有 3 个,机架 1 与构件 2、机架 1 与构件 3 的速度瞬心就在其转动中心。机构 2、3 的速度瞬心在其接触点的公法线上,有三心定理可得构件 2、3 的速度瞬心为 P23,该点线速度为 Vp23,有速度瞬心定义可得:
Vp23=P12P23·ω2 Vp23=P13P23·ω3
即:
P12P23·ω2=P13P23·ω3
据传动比的定义可知,传动比 i 等于两构件角速度之比,即:
i23=ω2/ω3=P13P23/P12P23

猜你喜欢
- 2024-04-042024年赤峰学院125400旅游管理《作曲基础知识》考研复试精品资料
- 2024-04-042024年赤峰学院125300会计《会计综合知识》考研复试精品资料
- 2024-04-042024年赤峰学院065100文物与博物馆《中国古代史(加试)》考研复试精品资料
- 2024-04-042024年赤峰学院065100文物与博物馆《文博综合》考研复试精品资料
- 2024-04-042024年赤峰学院065100文物与博物馆《文物学基础(加试)》考研复试精品资料
- 2024-04-042024年赤峰学院055200新闻与传播《新闻学概论(加试)》考研复试精品资料
欢迎 你 发表评论:
- 最近发表
-
- 【初试】2025年中国农业大学030100法学《731法学综合》考研精品资料
- 【初试】2025年中国林业科学研究院095400林业《812土壤学之土壤学》考研精品资料
- 【初试】2025年中国矿业大学(北京)035102法律(法学)《497法律硕士综合(法学)》考研精品资料
- 【初试】2025年中国空空导弹研究院081105导航、制导与控制《821自动控制原理》考研精品资料
- 【初试】2025年中国空间技术研究院(航天五院)0825Z1宇航材料工程《904材料力学》考研精品资料
- 【初试】2025年中国科学院西安光学精密机械研究所080300光学工程《815机械设计》考研精品资料
- 【初试】2025年中国科学院沈阳应用生态研究所071300生态学《841生态学》考研精品资料
- 【初试】2025年中国科学院南京地理与湖泊研究所070503地图学与地理信息《843遥感概论之遥感导论》考研精品资料
- 【初试】2025年中国科学院昆明植物研究所071001植物学《853遗传学》考研精品资料
- 【初试】2025年中国科学院广州能源研究所080500材料科学与工程《903物理化学B》考研精品资料
- 标签列表
本文暂时没有评论,来添加一个吧(●'◡'●)